

Quizás los tópicos más habituales de los vehículos eléctricos son el motor eléctrico propiamente dicho, así como las baterías, auténtico punto caliente cuando se habla de vehículos eléctricos, aunque hay muchos medios de transporte eléctricos que no utilizan baterías.
Sin embargo, hay muchos elementos más a tener en cuenta cuando uno habla de vehículos eléctricos. Algunos ya se han mencionado, otros son intuitivamente evidentes, otros sin embargo apenas se conocen o sólo se deja entrever su utilidad en esta serie de escritos.
Precisamente los elementos auxiliares y la electrónica interna del automóvil forman parte de la vida diaria del autor de estos soporíferos escritos, y no son escasos. Echarles una ojeada al menos da una idea de la complejidad del tema, así como algunos apuntes previos para la entrada posterior, que es precisamente uno de los puntos importantes y largamente olvidados en el asunto de estos textos, el de los fabricantes de automóviles.
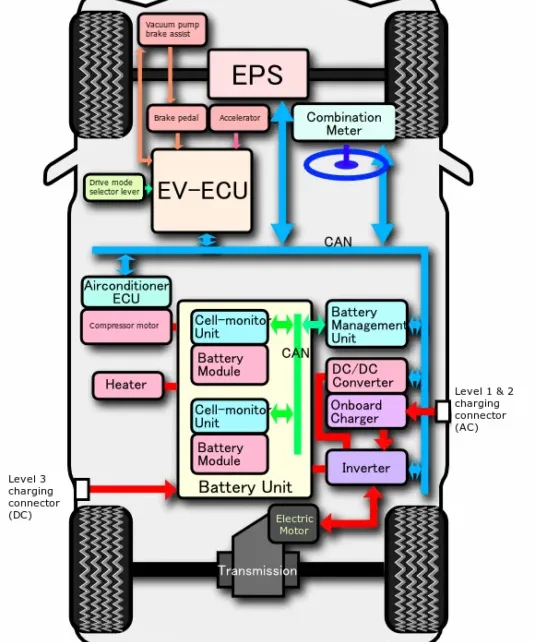
El primer (o primeros, a veces son dos) componente que hay que mencionar, reiteradamente pues ya se ha explicado su uso, es el sistema de supervisión de la batería. Se suele componer de dos partes: la de control de carga y balanceo de tensiones [1], medidas de temperatura y control individual de las células, y la parte de control y supervisión general con medida de corriente (que entra y sale), todo bajo un mismo sistema de gestión de la batería, con capacidad para cortar ambos polos de la misma del mundo exterior.
Se trata de un elemento electrónico no excesivamente complejo, con más o menos intríngulis (especialmente la medida de corriente), pero los algoritmos y las matemáticas que hay detrás, son las que determinan gran parte de las limitaciones del coche. Además, como ya se ha dicho, tiene un consumo que puede acabar por agotar las baterías al cabo de muchos meses, y parte de su funcionalidad, el balanceo de las celdas, provoca parte de las pérdidas de rendimiento del sistema de almacenamiento.
En la lista de puntos importantes de cara a la seguridad, lo primero que se pone bajo la lupa. El Know-How del mismo es considerado uno de los secretos más importantes en la industria del sector, una de las claves estratégicas. No sólo se trata de carga y control de energía que entra y sale, también se controlan las temperaturas y otros parámetros de seguridad.
El segundo elemento en cuanto a importancia y evidencia, es el control de motor, el inverter [2]. Su función es la de generar tensiones alternas trifásicas a partir de la continua de la batería en la mayoría del tiempo, sin embargo, a la hora de frenar, su función es la inversa. Se trata de un elemento que requiere muchas matemáticas para su funcionamiento, con electrónica redundante, sistemas de seguridad, supervisión constante, y refrigeración líquida debido a la potencia que maneja con rendimientos, aunque elevados, por debajo del 98%. La termodinámica alcanza todas las áreas de la física, y éste es uno de los elementos que introduce pérdidas. No se trata de una parte barata, precisamente.
También en este caso, las matemáticas son un factor importante. No hay tanta guerra de copyrights, pues muchas se basan en la transformada de Park y su inversa, así como en la transformada de Clarke [3]. Matemáticas puras y duras, ejecutadas varios miles de veces por segundo, lo cual implica millones de cálculos con sus decimales (en coma flotante) por segundo, y por partida doble: dado que es un elemento de seguridad, se calculan los valores en dos procesadores, y luego un sistema de supervisión comprueba que los dos den lo mismo para dar los datos (y por ende, el sistema) por bueno. Es lo que se llama redundancia. Para eso hace falta cierto tipo de microcontroladores específicos de seguridad [4].
El tercer elemento, es el cargador. De hecho, los cargadores, en plural. Aunque la mayor parte de esta circuitería es interna, es decir, va dentro del coche, también hay casos en los que una parte va fuera. Tampoco es un elemento sencillo, también es una parte refrigerada por líquido, y si son diferentes circuitos es debido a que no hay un estándar de carga, si no varios.
Dado que es otro elemento caro y sujeto a reglamentación por seguridad eléctrica, hay varios modos diferentes de carga.
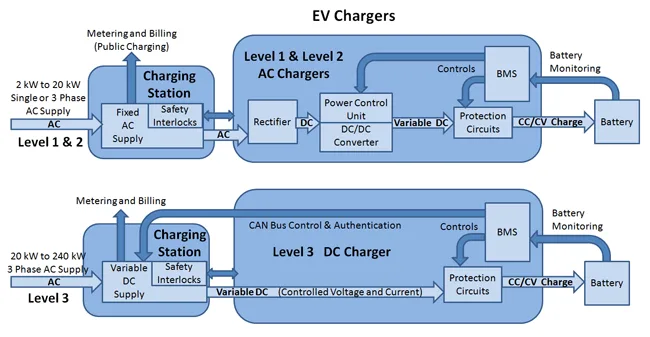
Por una parte, está el enchufe ‘de casa’, lo cual es posiblemente la parte más pequeña del cargador, totalmente integrada dentro del coche, puesto que la limitación en este caso, es la del contrato del propietario, la responsable de una parte de cuota fija de las facturas de la electricidad. Lo habitual en un contrato en España está entre 3 y 5KW para el uso doméstico, y por tanto no tiene sentido poner un cargador de más capacidad para tales funciones. Esto genera una carga lenta o muy lenta, de varias horas, y por tanto, con pocas pérdidas. El nivel de seguridad es el habitual doméstico. Se le llama ‘Nivel 1’.
Sin embargo, si se pretende cargar el vehículo en unas instalaciones comerciales o industriales con potencias disponibles más elevadas, hace falta algo capaz de gestionar este tipo de cargas, sobre todo, si luego se va a facturar por ellas. Es entonces que salen unidades externas de carga. En realidad, tampoco son cargadores. Son gestores de potencia, para limitar la potencia entregada al vehículo en función de la potencia disponible. Por supuesto, están los que no tienen tarificación, para uso particular, y los que sí tienen, para uso comercial. Y nunca se incluye su precio en el vehículo.
Hay dos variantes aplicables a este tipo, la de Nivel 2, de hasta 16 A, y la de Nivel 3, hasta 32 A [5]. Muchas veces se agrupan bajo la denominación Nivel 2. Todas de alterna, y todas con el control en la unidad externa. La funcionalidad es simplemente la de monitorizar en todo momento la potencia disponible para adecuar el suministro a las capacidades de la instalación, y así evitar posibles sobrecargas. También pueden utilizarse para parkings públicos o compartidos para evitar que personas no autorizadas utilicen la toma para otros vehículos.
Estas unidades externas pueden ser de potencias relativamente modestas, del orden de los 5 a 19 KW, para cargas moderadas (del orden de dos a seis horas), que suelen trabajar con alterna, trifásica la mayoría de las veces, y la función real de la carga la hace un circuito interno del vehículo, y que para este orden de potencia, ya necesita refrigeración líquida, incurriendo en ciertas pérdidas mayores que en la carga lenta. A veces, este tipo de carga, también conlleva la activación del circuito de refrigeración de la batería, con lo que las pérdidas suben debido al uso del refrigerador.
Pero también hay unidades externas de potencias elevadas para recargas rápidas [6]. En estos casos, estos circuitos suministran potencias de más de 20KW, alcanzando los 62.5KW, en tensiones continuas de hasta 500V o más, con niveles de seguridad elevados, comunicación entre la unidad externa y la interna del vehículo, y otras capacidades, como el uso inverso: alimentar la red eléctrica a partir de la batería.
Este tipo de cargadores de Nivel 4 (aunque en la literatura se catalogan a veces como Nivel 3) son los encargados de las recargas rápida, y en realidad, el cargador está en la parte de fuera, con su propio sistema de refrigeración. En estos casos, además, también se activa el sistema de refrigeración de las baterías, pues para cargas rápidas es absolutamente necesario, aunque el vehículo se recargue a temperaturas bajo cero. Los rendimientos caen en picado en estas circunstancias, motivo por el cual hace falta refrigeración. Además, el estrés eléctrico de las baterías es elevado, acortando la vida útil de las mismas en caso de abuso de la recarga rápida, debido al calor generado, entre otros motivos de envejecimiento.
Para cada uno de los casos, hay diferentes estándares de conector. El último se ha tomado de la más avanzada infraestructura japonesa, y se llama CHAdeMO [7], aunque hay otras variantes, y no todos los fabricantes, como Tesla, se adhieren a este estándar de facto. De hecho, Tesla utiliza su propio estándar de hasta 120KW, ya que sus vehículos tienen autonomías más elevadas que el resto. Lo que está claro, es que hace falta un control de la carga por parte del vehículo en estas circunstancias, pues es la unidad de control y supervisión de la batería la que determina en todo momento la carga que ésta es capaz de aceptar.
Y eso implica un estándar de comunicación para que este cargador externo se adapte a las necesidades del coche y su batería en cada momento. Esta comunicación pasa invariablemente por añadir pines a un conector con grandes terminales de corriente, y algunos pequeños destinados a la comunicación. Así pues, con los estándares y protocolos de comunicación hemos topado.
Otro de los puntos poco vistos y habitualmente obviados muy intencionadamente de las discusiones sobre vehículos eléctricos, es toda la cacharrería auxiliar. Los coches modernos están rellenos de equipamiento como pavos el día de acción de gracias. Electrónica muy sofisticada para hacerlos más llamativos y añadir argumentos de venta, empezando por el obligatorio salpicadero, pasando por el infotainment, navegadores, Head Up Displays, ABS, elevalunas eléctrico, lunetas térmicas, climatización multizona, asientos eyectables, lanzadores de misiles y el supernecesario rayo láser. Y luces, muchas luces.
Todo este equipamiento va alimentado eléctricamente, por supuesto. Incluso dos elementos que en los coches térmicos no lo están, como son la dirección asistida (que las hay eléctricas en coches térmicos, nada nuevo), y el servofreno.
Casi todos estos añadidos van alimentados a los habituales 12 V de la batería. Algunos se controlan directamente, otros con el contacto, otros no. La climatización, en un vehículo eléctrico, no funciona a partir de los 12V de la batería, si no directamente de la batería principal. Al fin y al cabo, mantener ésta en óptimas condiciones térmicas es un asunto de importancia máxima, de seguridad, y pasa por encima del conductor y su voluntad.
Así pues, hay un elemento necesario en estos vehículos, para pasar energía eléctrica de la batería principal de alta tensión (High Voltage o HV) al circuito de baja tensión, comúnmente conocido en el sector como KL30 (Klemme en alemán, Clamp en inglés). El número es el identificativo de cierta borna, estandarizado a nivel internacional. KL30 es la borna positiva de la batería de los coches normales, los 12V (que en realidad están entre 13 y 15). KL31 es la borna negativa, habitualmente el chasis o la carrocería metálica. KL15 es el contacto.
Dado que por ley, las líneas de HV no pueden estar en contacto eléctrico con ninguna de las KL mencionadas, hace falta un aislamiento galvánico entre estas. Eso implica volumen, peso, y ‘bajo’ rendimiento (80 – 95%) en un aparato conocido como conversor DC/DC. Su función es pasar la tensión continua de la batería principal a la tensión continua de la red secundaria [8].
Y aquí se vuelve a liar la cosa. Volvemos otra vez a las pérdidas por resistencia eléctrica, como se comentó en las primeras entradas de esta serie.
En la red secundaria hay algunos elementos de potencia que consumen mucha corriente: luces (55W cada bombilla de los faros delanteros), lunetas térmicas (150W la trasera, menos los retrovisores, entre 100 y 300 el parabrisas que lo llevan), asientos calefactables, motores varios (ventiladores del sistema de climatización, retrovisores ajustables, puertas que se abren y cierran), limpiaparabrisas, elevalunas eléctricos, mechero, ventiladores del radiador, aunque en eléctricos puros son pequeños, bombas de circulación del líquido refrigerante, servofreno, dirección asistida, asientos ajustables eléctricamente, etc.
Los requerimientos de potencia en la línea de KL30 suelen estar en el orden de 1,5 a 3,5 KW de potencia (hasta 300 A a 14V), más o menos del mismo orden que los sistemas de aire acondicionado, que pueden llegar a 4,5 KW en vehículos grandes.
Estas condiciones implican pérdidas grandes, pues volvemos a trabajar con corrientes similares a las requeridas para el motor principal, del orden de los 300 A. Pero en estos casos, las pérdidas son mucho más representativas, pues puede ser un % muy elevado debido a la baja tensión.
Así pues, hace ya varias décadas, los grandes fabricantes empezaron a trabajar en alternativas, y se encaminó bastante una solución a tensiones más elevadas, del orden de 42 a 48V [9]. Ese camino se cerró debido a los inconvenientes de la migración y a que la irrupción en Japón de los híbridos cambió el panorama. Máxime con la aparición de la chapuza esta que llaman Start&Stop.
Dado los apaños y problemas de este último invento, muchos, múltiples, variados, y sobre todo, costosos, se ha retomado el asunto de las tensiones elevadas para KL30.
Como de costumbre, los que llevan la batuta son una vez más, los teutones. Y éstos están trabajando con tensiones de 48V para reducir las pérdidas y los problemas en diferentes apartados de elevado consumo, especialmente para los sistemas Start&Stop, que también se utilizan en los híbridos.
A esta línea se apuntaría todo aquello que requiere un consumo elevado: motores y suplementos térmicos. La electrónica de a bordo quedaría generalmente excluida, aunque no se descarta. Esto nos deja el panorama nuevamente dibujado con más conversores DC/DC, para dar soporte a dos líneas de alimentación (48V y la clásica KL30).
Pero no se vayan todavía, que aún hay más. Si, si, no nos basta con una batería de 48V para arrancar el diesel del híbrido o para encender las luces o para la luneta térmica, no. Hay que añadir la seguridad de a bordo.
Es obvio que si un vehículo eléctrico se queda sin batería por múltiples razones, pongamos por ejemplo, porque ésta ya no tiene carga debido a que no la hemos recargado, o a que ha envejecido, el vehículo no nos debe dejar tirados en medio de la carretera, sin frenos, sin dirección.
Así puestos, la dirección asistida, así como los servofrenos, deben tener su propio circuito de seguridad. Y eso pasa por trabajar a tensiones bajas, puesto que los contactores de la batería HV pueden fallar, es más, se deben asegurar que en caso de avería, se corta el suministro de HV. Pero no se puede cortar la alimentación al servofreno, ni a la dirección asistida, que deben contar con un sistema alternativo de alimentación de seguridad, que bien puede ser la batería de 48V.
Pero es que el servofreno [10], además, es complicado si queremos aprovechar una frenada para regenerar la carga en las baterías. Debe ser capaz de aplicar frenada regenerativa en la cantidad que la batería HV acepte, y si es necesario frenar más fuerte, entonces debe añadir la cantidad necesaria de freno ‘normal’ (de tambor o de disco, vamos). Incluso en una misma frenada, con la batería vacía derivará la máxima energía a recargar la batería probablemente sin necesidad de activar el freno normal, pero con la batería llena, la debe hacer toda con el freno normal, aunque el conductor no note la diferencia.
Y frenar con los discos o frenos de tambor, requiere bastante energía. Para hacer una prueba, basta con frenar un coche térmico con el motor parado. Especialmente si es un diesel grande. Y entonces, hay que arrancar el motor. Se nota exageradamente cómo el pedal del freno se hunde, como el vehículo se frena más (se nota especialmente en una cuesta abajo) con menos presión. Eso se debe a que el servofreno sólo actúa con el motor encendido. Pero si no hay motor encendido (un eléctrico o un híbrido, ojo), entonces este servo lo debe aplicar el sistema de frenado, con su consumo correspondiente.
¿Sencillo? Pues compliquémoslo. Pongamos dos o tres o cuatro motores, cada uno con su inverter. Esto tiene ciertas ventajas: se pueden poner los motores dentro de las mismas ruedas, con lo que el espacio ocupado es mínimo. Al ser estos motores de menor potencia, el rendimiento generalmente tiende a subir ligeramente. Y lo mejor de todo: tenemos control absoluto sobre cada rueda. Es decir, tenemos la capacidad de controlar totalmente lo que tracciona y/o frena cada rueda. Esta es exactamente la base de los controles de estabilidad [11], aunque los actuales están limitados sólo a controlar las potencias de frenado, e indirectamente, la capacidad de tracción en las ruedas motrices frenándolas, si bien generalmente el control de estabilidad actúa sobre todo en frenadas.
Ahora, el control puede ser mucho más amplio y aplicarse también con mejores efectos en pavimentos muy deslizantes para la tracción, por ejemplo, sobre nieve, hielo, grava. En los países nórdicos, justo donde las baterías duran más, esto puede llegar a ser de la máxima importancia.
Sin embargo, ahora ya no sólo tenemos un inverter que responde a los pedales de acelerador y freno, si no que hace falta alguien que reparta las órdenes de aceleración/frenado a cada rueda independientemente, a partir no sólo de los pedales, sino también de los sensores de rotación de las ruedas (los que usa el ABS, y que en un vehículo eléctrico viene con el motor pues es básico para que el inverter funcione con el máximo de rendimiento) y de los amortiguadores para el ESP. Es decir, hace falta otra unidad de control especializada en ABS/ESP que haga las veces de diferencial (o diferenciales) electrónicos.
Este aparato en concreto además de ir por duplicado como pasa con los inverters (y los ABS), tiene que trabajar con algo más complejo que las transformadas geométricas de Park: trabaja con los filtros de Kalman [12], Wiener-Kolmogorov [13], sistemas de control H2 o H-infinito [14]. Más mates, más complejidad, todo en tiempo real.
Volviendo a la realidad más habitual, dejando de lado las complicaciones matemáticas, hay algunos puntos todavía por atar en los vehículos eléctricos puros: el subsistema de seguridad o de respaldo, basado en una batería extra, de baja tensión, con todo lo necesario para mantener el funcionamiento de seguridad del vehículo en caso de emergencia, tal y cómo se ha comentado antes, son la electrónica de supervisión necesaria (control de la batería, conversor DC-DC, dirección y freno asistido, algún sistema de indicación), y sobre todo, el método o sistema de detección de problemas.
Éste es un añadido a todos los sistemas que integran el vehículo y que forman parte de la cadena de HV del mismo, y consta de partes físicas o Hardware, y partes lógicas o Software (HW, SW respectivamente). Hemos visto algunas de las partes SW: el sistema redundante con procesadores dobles y supervisión de los resultados, por ejemplo, el sistema de monitorización de las baterías, los contactores internos del pack de baterías, el ABS/ESP.
Pero hay una parte HW muy importante, también repartida por todas partes hasta extremos curiosos, pero no por ello innecesarios. Uno de los clásicos es el llamado Interlock [15]. Un cablecito que está integrado en todos los cables grandes de HV del vehículo, que pasa por el pack de baterías, el inverter, el motor, el aire acondicionado y que sirve para detectar si alguno de estos cables se corta o alguno de los elementos se desconecta, como por ejemplo, cuando se cambia de batería.
Una ruptura de la continuidad eléctrica en el cable implica que se debe cortar el suministro de HV en toda la circuitería, no sea cosa que alguno de los cables de HV proporcionase energía fuera de los parámetros establecidos, es decir, que hubiese un cruce, cortocircuito, y alguien o algo resultase dañado, por ejemplo por electrocución, o que se iniciase un incendio. Este es uno de los sistemas de detección de accidente y supervisa uno de los parámetros bajo los cuales se debe cortar este suministro eléctrico. Hay más, como por ejemplo el sistema del Airbag.
Hemos hablado de coches eléctricos, pero no de otra variante muy relacionada: los híbridos. En el fondo, es mezclar los dos tipos de motores, el ‘convencional’ de combustión interna, más uno (o varios) eléctrico, con un sistema de acumulación de energía eléctrica, y algo para gestionar dichos motores.
Por la extensión de todo lo relacionado con los híbridos, vamos a dejar estos para más tarde. Sin embargo, el punto final en esta entrada debe incluir a éstos en las implicaciones que conlleva todo lo relacionado con cualquier vehículo eléctrico o híbrido: aún más electrónica para controlar qué motor y cómo funciona el vehículo en cada momento, también algunos extras como el control manual de tracción para seleccionar el modo de funcionamiento, por ejemplo, de un 3008 Hybrid4. Es decir, más complejidad aún.
Hasta aquí una aburrida colección de extras y ‘gadgets’ asociados con el vehículo eléctrico y el híbrido. Una completa y pesada imagen de lo que implica semejante cambio de paradigma que refleja los recovecos y las complejidades a las que se enfrenta este nuevo tipo de motorización. Pero aparte de aburrir, hay que ver ciertas vertientes poco conocidas, muy relacionadas, y que significan un cambio de tercio en este texto bastante importante.
Veamos. Supongamos que el motor eléctrico tenga una capacidad para ser fabricado correctamente y bien a la primera (en el mundillo, First Pass Yeld, FPY para los amigos, que significa ‘pasa a la primera’) del 99%. La posibilidad de que no pase, a nivel matemático, se expresa en tanto por uno, o 0.99 [16].
Si suponemos que el inverter asociado tiene una FPY del 98%, el resultado combinado de unir ambos en un vehículo, es del 0.99 * 0.98 = 0.9701 o 97.02% de FPY.
En breve: cuanto más chismes metamos, es decir, a más complejidad, más piezas malas y problemas vamos a tener.
En la industria electrónica, lo habitual de un aparato electrónico está alrededor del 99%, aceptando un mínimo del 98%, y siendo malo cualquier cosa por debajo del 97%. Crítico o pésimo si no llega al 95%, que muchas veces genera gabinetes de crisis.
Con esto en mente, los fabricantes prueban todo lo que fabrican, miran de reparar lo que pueden, y si consiguen sacar un 99% o más de piezas que fabrican sin problemas, entonces fenomenal. Así calculan para la producción y para tener beneficios, márgenes de 97% mínimo, cargando el 3% más al coste de producto bueno vendido el importe de lo que no da bueno a la primera, de las reparaciones o retrabajos, y del rechazo o scrap.
Dado que las baterías, así como otros elementos, especialmente en sus primeras etapas en que suelen ser más complicados, tienen posibilidades de fallo peores del 98%, el precio sube correspondientemente. Por tanto, que sólo salga, pongamos, el 80% de lo que se produce, el resultado es la quiebra, la bancarrota. Todo lo que baje del 97% final es un problema para el fabricante de primera magnitud.
En resumen de todo este largo texto: los vehículos eléctricos tienen que ser más caros porque son más complejos, tienen más piezas que pueden fallar, más mínimos de Liebig, más problemas de fabricación, más inversión, más complejidad, que redundan en una menor vida útil, menor rendimiento, menor fiabilidad, menor autonomía (fruto de minimizar baterías y reducir rendimiento), y en general, más problemas, y éstos más fatales. Aunque tengan menos mantenimiento, éste suele pasar por cambiar piezas caras (como las baterías), sin posibilidad real de reparación.
Ahora supongamos que hacemos un pack de baterías con cien celdas (360V, algo habitual) con un FPY del 99% unitario. Las baterías no son el elemento más fiable, y obtener un 99% de celdas en el mercado que sean buenas al final del primer mes de funcionamiento, es algo bueno. Si calculamos el resultado para el pack completo es de 0.99100 = 0.366 o 36.6%.
¿Lo subimos a 200 celdas?
[1] – http://en.wikipedia.org/wiki/Battery_balancing
[2] – http://en.wikipedia.org/wiki/Variable-frequency_drive
[3] – http://en.wikipedia.org/wiki/Vector_control_%28motor%29
[5] – http://cleantechnica.com/2013/05/09/bosch-introduces-sub-450-level-2-car-charger/
[6] – http://en.wikipedia.org/wiki/Charging_station
[7] – http://en.wikipedia.org/wiki/CHAdeMO
[8] – http://en.wikipedia.org/wiki/Forward_converter
[9] – http://en.wikipedia.org/wiki/42V
[10] – http://es.wikipedia.org/wiki/Servofreno
[11] – http://en.wikipedia.org/wiki/Electronic_stability_control
[12] – http://en.wikipedia.org/wiki/Kalman_filter
[13] – http://en.wikipedia.org/wiki/Wiener_filter
[14] – http://en.wikipedia.org/wiki/H_infinity


